Automatska linija za pakovanje koordinatnih kutija





Automatski koordinatni slučajlinija za pakovanje,
linija za pakovanje,
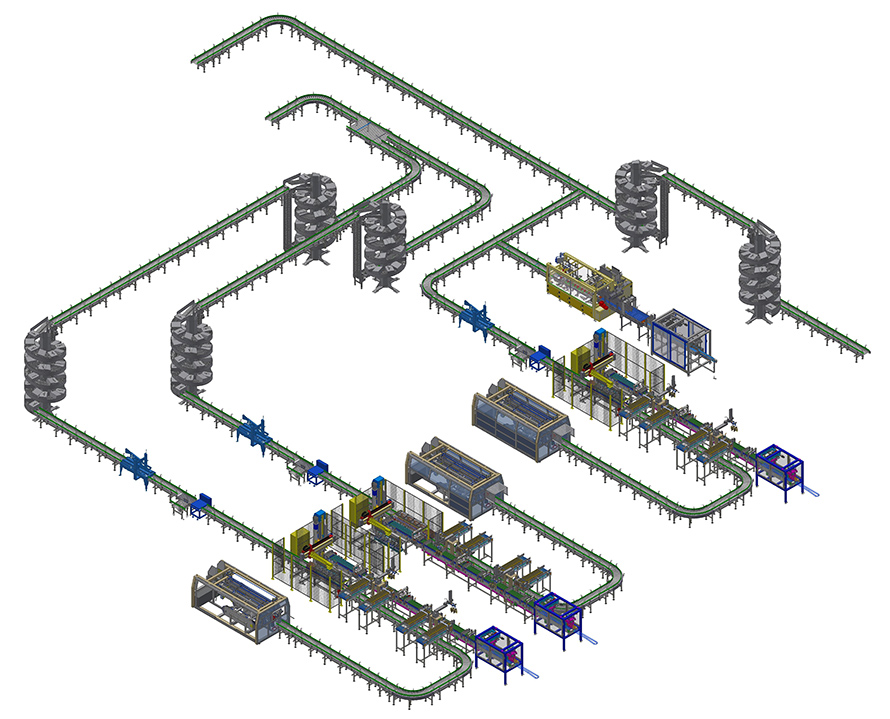
Proizvodna linija za ambalažu sastoji se od brzog razdjelnika, linije za transport proizvoda, hvataljke, Hbot-a, mehanizma za pomicanje s dvostrukom osovinom, linije za transport kutija, mehanizma za detekciju, hvataljke za kartonsku pregradu, sistema za uvlačenje kartonske pregrade, servo koordinate, hvataljke za boce i zaštitne ograde. Brzi razdjelnik dijeli proizvode u više traka, dok mehanizam za pomicanje s dvostrukom osovinom ubrzava prolaz proizvoda. Nakon što proizvod stigne na stanicu za pregradnju kartona, Scar robot ubacuje kartonsku pregradu u složene proizvode. Proizvodi stižu na transporter za sortiranje. Nakon toga, proizvodi se uzimaju hvataljkom i stavljaju u kartonsku kutiju, a transporter za kutije transportuje kutiju koja sadrži proizvod.
Kompletan raspored sistema za pakovanje
Glavna konfiguracija
| Robotska ruka | ABB/KUKA/Fanuc |
| Motor | SEW/Nord/ABB |
| Servo motor | Siemens/Panasonic |
| VFD | Danfoss |
| Fotoelektrični senzor | BOLEST |
| Ekran osjetljiv na dodir | Siemens |
| Uređaji niskog napona | Šnajder |
| Terminal | Feniks |
| Pneumatski | FESTO/SMC |
| Vakuumski disk | PIAB |
| Ležaj | KF/NSK |
| Vakuumska pumpa | PIAB |
| PLC | Siemens /Schneider |
| HMI | Siemens /Schneider |
| Lančana ploča/lanac | Intralox/rexnord/Regina |
Opis glavne strukture




Više video emisija
- Servo koordinatni paker za staklene boce sa kartonskom pregradom
Kako se upravlja mašinom za pakovanje? Proizvodi prolaze kroz niz automatizovanih
i uređene korake, uključujući sortiranje kroz transportnu proizvodnu liniju, prelazak na sortiranje, ubrzani međuspremnik, mašinu za pakovanje, automatski mehanizam za zatvaranje i konačno izlaz putem transportne linije.










